
Vorbemerkungen
Kürzlich habe ich ein GPS in meine Cygnet Geprc verbaut. Die Gründe für mich waren:
– verbessertes Failsafe (Rescue Mode)
– Anzeige Home Direction
– Anzeige Geschwindigkeit und Höhe
Zum Failsafe ist anzumerken, daß es sich in Betaflight nicht um ein perfektes Return to Home handelt, sondern um einen Rescue Mode. Die Drohne fliegt in Richtung Home und sollte dann vom Piloten übernommen werden.
Einbau
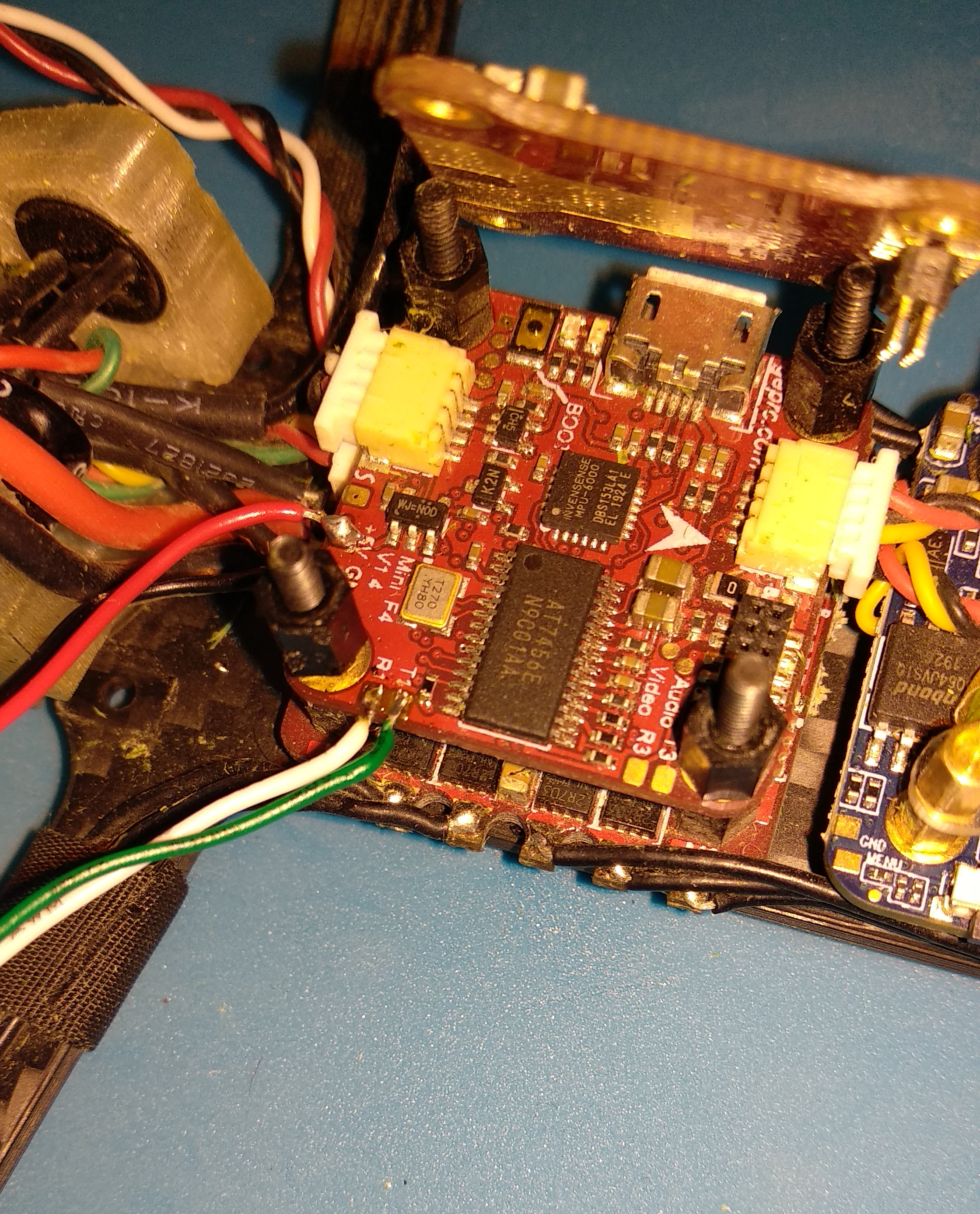
Gekauft habe ich mir ein Beitian BN-220, da es mit seinen 5.3g sehr leicht ist. Ich habe es an den Port 1 (TX1 / RX1) angeschlossen, da die anderen Ports belegt waren. Denkt dabei jeweils TX mit RX und RX mit TX zu verlöten. Das GPS verträgt 5V, was direkt vom Flight Controller abgegriffen werden kann.
Danach können die Einstellungen in Betaflight vorgenommen werden.
Betaflight
Ich beziehe mich auf die Einstellungen in BF 3.5.7.
Anschlüsse
In Betaflight habe ich zunächst im Tab Anschlüsse das GPS auf UART1 mit einer Geschindigkeit von 57600 aktiviert. Danach bitte Einstellungen speichern.

Konfiguration
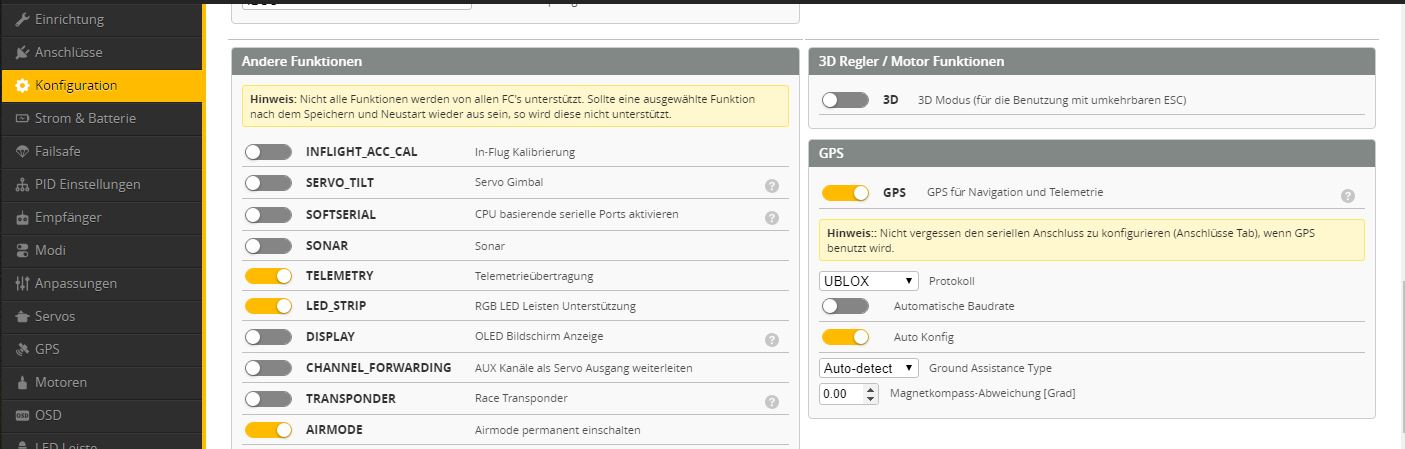
Danach geht es weiter zum Tab Konfiguration. Dort wird das GPS enabled und das Protokoll UBLOX eingestellt. Die Baud Rate habe ich vorgegeben, daher ist diese nicht automatisch.
Failsafe
Im Tab Failsafe gibt es zwei Stufen (um diesen Tab zu sehen, müsst ihr den Experten Modus aktivieren). Stufe 1 definiert die Aktion innerhalb einer definierten Wartezeit nach Signalabbruch, Stufe 2 die Aktionen nach der definierten Wartezeit.
Stufe 1:
In Stufe 1 wird bei mir erst einmal der Copter mittels des Schalter AUX3 in den Angle Modus gesetzt. Dadurch ist der Copter erst mal stabil. Alle anderen Einstellungen sind auf Hold. Der Receiver bemerkt den Verbindungsabbruch und ist so eingestellt, daß der Throttle unter die gültige minimale Länge von 885 fällt. Dies habe ich in der Fernsteuerung so definiert.
Stufe 2:
In Stufe 2 kann man die Wartezeit definieren. Bei mir ist die Wartezeit 5*0.1 Sekunden, also eine halbe Sekunde. Dann Go Rescue aktivieren.

Modi
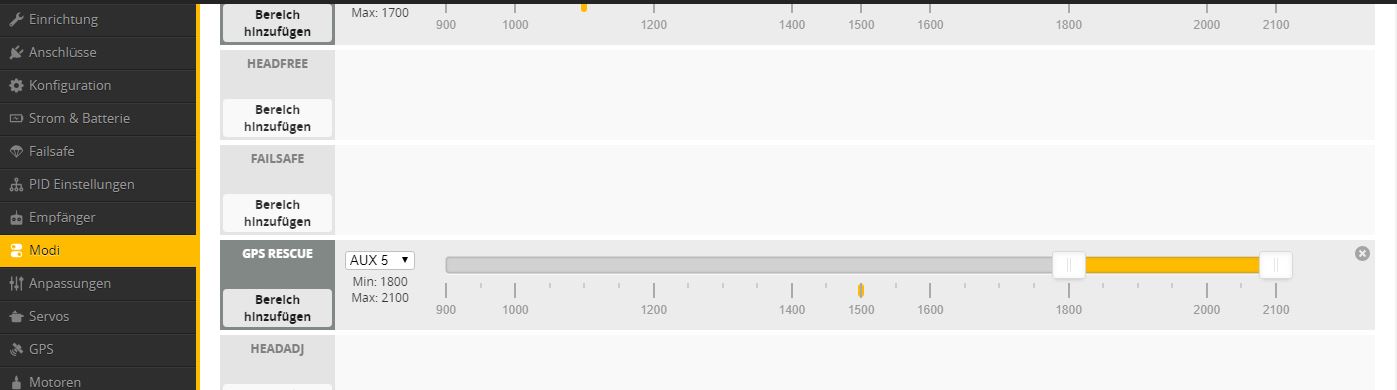
Ich habe einen Schalter definiert, mit dem ich das Failsafe selbst auslösen kann. Oder falls der Copter Failsafe auslöst, empfiehlt es sich diesen Schalter zu aktivieren und erst dann wieder zu deaktivieren, wenn man den Copter übernehmen möchte.
OSD
Nun könnt ihr in Eurem OSD einige Infos plazieren.
Ich habe bei mir Timer 2 (Flugzeit) aktiviert und plaziert. Fpr Timer 2 könnt ihr auch einen Alarm definieren.
Daneben habe ich die GPS Satelliten (wichtig für das Arming) und die GPS Geschindigkeit und Höhe aktiviert. Richtung und Entfernung Startposition geben Euch die Richtung nach Hause sowie die Entfernung an.

Kommandozeile
In der Kommandozeile könnt ich noch einige Feineinstellungen setzen. Mit get variable bekommt ihr den aktuellen Wert und mit set variable = 123 setzt ihr den Wert. Am Ende das Kommando save nicht vergessen, sonst wird nichts abgespeichert. Anbei meine Einstellungen mit einigen Erklärungen:
gps_rescue_angle = 32
Allowed range: 0 – 200
Das ist der maximale Winkel, den der Kopter beim Flug aufweisen darf.
gps_rescue_initial_alt = 50
Allowed range: 20 – 100
In dieser Höhe fliegt der Copter zu Euch nach Hause.
gps_rescue_descent_dist = 200
Allowed range: 30 – 500
Ab dieser Entfernung fängt der Kopter an zu sinken.
gps_rescue_ground_speed = 1500
Allowed range: 30 – 3000
Default value: 2000
Das ist die Geschwindigkeit in cm pro Sekunde in der der Copter zu Euch nach Hause fliegt.
gps_rescue_sanity_checks = RESCUE_SANITY_ON
Allowed values: RESCUE_SANITY_OFF, RESCUE_SANITY_ON, RESCUE_SANITY_FS_ONLY
Dieser Modus macht einige Sanity Checks bevor der Rescue Mode aktiviert wird.
gps_rescue_min_sats = 6
Allowed range: 0 – 50
Default value: 8
Die minimale Zahl der Satelliten die für den Rescue Mode genutzt werden.
Testflug
Beim ersten Test wird das GPS etwas Zeit benötigen um einen ersten Fix der Satelliten zu bekommen. Vielleicht wollt ihr erst einmal einen Fix bei Euch im Garten durchführen und dann auf das Feld gehen. Dann sollte es schneller klappen.
Tutorial

